











")


















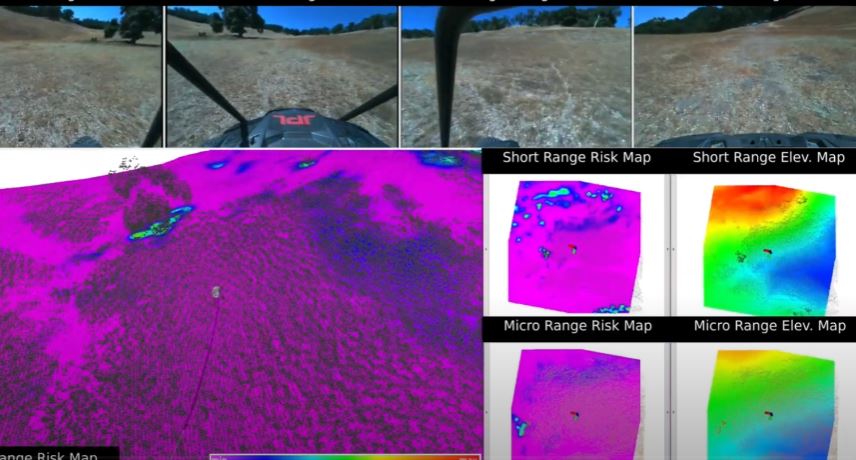
Autonomous off-road navigation can be challenging for robots. It requires understanding of conditions and geometric information. RoadRunner M&M is an end-to-end learning-based framework that predicts “the traversability and elevation maps at multiple ranges.” As input, it takes a voxel map and multiple images. Robots using this framework will be able to assess their surroundings in high detail.
More like this ➡️ here
RoadRunner M&M: Dense Forest Environment (Out-Of-Distribution)

According to the researchers, this approach achieves up to 50% better elevation mapping and 30% enhanced traversability estimation over the previous version.
[HT]
*Our articles may contain aff links. As an Amazon Associate we earn from qualifying purchases. Please read our disclaimer on how we fund this site.














