
Multi-wheel robots transporting payloads over flat terrain is nothing new. They do struggle over rough terrain, so biped robots may be a better option. This video explores the idea of using multi-biped robot carriers for these types of tasks. The goal was to design “a decentralized controller for such systems that can be effectively applied to varying numbers and configurations of rigidly attached bipedal robots without retraining.” Training the controller was done with reinforcement learning.
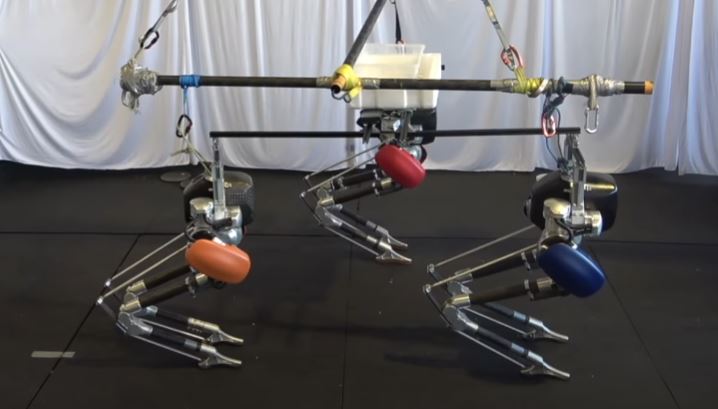
The controller was demonstrated with 2 and 3 Cassie robots.
[HT]



