









 with App")





















RoboHelix Robot Creates Spiral Auger by Forming Perfect Flights
Meet the RoboHelix: a robotic system that creates spiral augers by forming flights. It uses HelixNinja software to get the job done. The machine requires minimal operator interaction. It is safe to use for humans and reduces errors.
RangerBot: Autonomous Robot Reef Protector
Here is an autonomous underwater robot that can be used to protect coral reefs from crown-of-thorns starfish. The RangerBot AUV is a vision-based robot capable of detecting COTs with 99.4% accuracy and killing them without damaging the reef.
The RangerBot gives reef managers and researchers hands and eyes under water. More info is available here.
Naïo Technologies’ Large Scale Weeding Robot

Here is a large scale weeding robot from Naïo Technologies that straddles vegetable beds to weed large farms. It weeds crops autonomously and without human supervision thanks to its tools and guiding mechanism.
AirSelfie2 Palm-Sized Camera Drone + Power Bank

Here is a palm-sized camera drone that lets you capture beautiful 12MP photos and 1080p HD videos from the air. The AirSelfie2 has an anodized aluminum frame and lightweight design (2.8oz). The drone flies stably thanks to 4 micro-brushless motors. It can fly up to 65′ high.

NimbRo-OP2X: 3D Printed Soccer Playing Robot

Meet the NimbRo-OP2X: a 3D printed open source humanoid robot capable of playing soccer. The robot has a modular structure and an ROS based software. The robot weighs 9kg and stands 135cm tall. It has 34 actuators and lasts up to 40 minutes on battery.

The above video shows this robot in action. It was developed by the Autonomous Intelligent Systems group of University of Bonn, Germany.
Maryland Researchers Develop Fish Inspired Robotic Submarine

In the past few years, we have covered plenty of robotic fish that can be used for research and other tasks. Maryland researchers are developing a robotic submarine that looks and behaves exactly like a fish. It is made of rubber and uses sensor nodes to replicate the lateral line system.

An electric motor attached to a momentum wheel is used to enable to robot to move like a real fish. Such robots can be used to collect samples to analyze water quality.
[HT]
Alpha Training Blue Robotic Raptor with Realistic Movement

So you have a thing or two about dinosaurs? The Alpha Training Blue is a robotic raptor you can bring home without worrying about getting eaten alive. This velociraptor comes with 4 modes of play (Training, Guard, RC, and Total control). It moves, blinks, chomps, and responds to your commands.
Spry Waterproof Drone with 70 km/h Speed
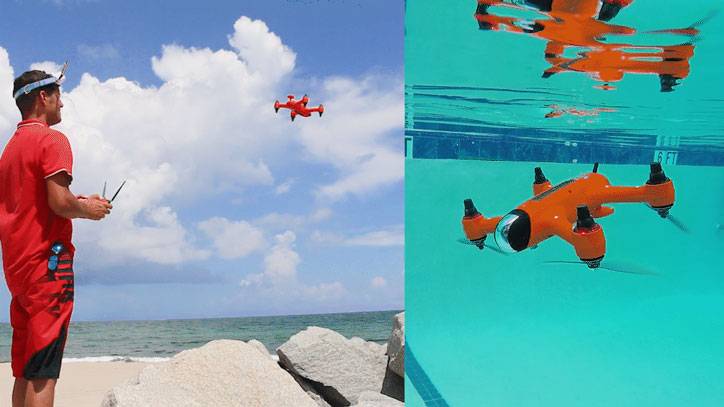
Meet the Spry drone: a waterproof drone that can not only fly in the air but also submerge in the water. It comes with a waterproof remote with a 4.3″ video monitor. The drone is capable of floating like a boat. It has a camera with 4K video and 12Mp still photo capability.
Bi-Manual Robot Teleoperation Using a RGB-D Range Sensor

Here is a bi-manual teleoperation system that is controlled using input data from a cheap RGB-D range sensor (like the ASUS Xtion PRO). Such an approach would allow operators to interact with robots from a distance without having to use fancy exoskeletons and sensors. As the developers explain:
we implemented a 3D version of the OpenPose package. The first stage of our method contains the execution of the OpenPose Convolutional Neural Network (CNN), using a sequence of RGB images as input. The extracted human skeleton pose localization in two-dimensions (2D) is followed by the mapping of the extracted joint location estimations into their 3D pose in the camera frame. The output of this process is then used as input to drive the end-pose of the robotic hands relative to the human hand movements, through a whole-body inverse kinematics process in the Cartesian space

The approach was tested on the Centauro robot.
[HT]





