































Pearl: Toyota’s Violin Playing Robot

In the past few years, we have covered plenty of amazing musical robots here. Pearl is also worth a look. It is Toyota’s violin playing robot. This video from Kazumichi Moriyama shows this robot in action.
JT-A Ping Pong Robot with 9 Modes
Practicing ping pong on your own is not ideal. The JT-A Ping Pong Robot can help: it serves as your practice partner. It can handle 300 table tennis balls. It has a remote control panel for adjusting frequency and spin. This machine can serve 9 kinds of spinning balls (topspin, backspin, …).
BeBot & Pixie: Beach and Water Cleaning Robots

The idea of using robots to clean beaches is nothing new. We have covered a couple of projects on that in the past. BeBot & Pixie are beach & water cleaning robots. The BeBot is a remote controlled, solar & battery powered beach cleaning robot that can clean up to 32000 square feet per hour. It rakes through the sand to collect bottles, cans, and cigarette butts.
DJI Avata Palm-Sized FPV Drone Announced

Meet the DJI Avata: a palm-sized FPV drone capable of agile maneuvers. It comes with a 155-degree FoV and shoots 4K 60fps video. It has a flight time of 18 minutes on battery. It has an intuitive controller too (DJI Motion Controller). Avata has propeller guards for safe flying. It comes with downward sensing obstacle avoidance, emergency brake, and other safety features.
Yahboom Building:Bit Superkit Educational Robot

Meet the Yahboom Building:Bit Superkit: an educational robot kit with building blocks that can be used to make 16 different types of robots. It has LEGO compatible bricks. These robots support MakeCode programming. More experienced students can experiment with Python.
Quad-SDK ROS Based Framework for Agile Quadrupedal Locomotion
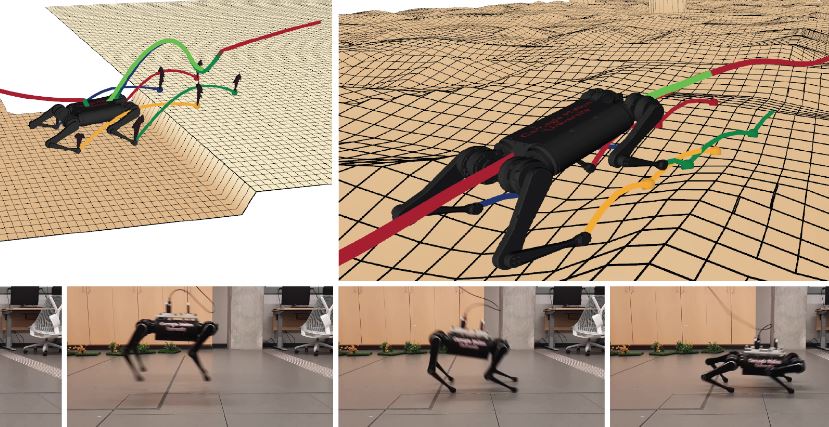
Here is a framework developed for agile quadrupedal robot locomotion developed by the Robomechanics Lab at Carnegie Mellon University. Quad-SDK is an open source ROS-based full stack framework with a modular design that lets researchers experiment with implementation of different components.
Lydsto W2 5000Pa Self Cleaning & Emptying Robot Vacuum

Here is another smart robot vacuum that cleans your floors without you having to break a sweat. The Lydsto W2 comes with 5000Pa suction power and 12N pressurized mopping capability. This self emptying robot vacuum delivers warm water mopping. It has a 4L water tank and a 3L dust bin.
This Robot Plays Drums on iPad
MegCell’s guitar playing Arduino robot is pretty exciting. The project hit Kickstarter a few days ago. That’s not the only robot Bruce is working on. As you can see in the below video, he is working on a robot that can play drums on an iPad. From what we can tell, it seems to be using two styluses to interact with the app.
ECOPPIA E4 Water-Free Solar Panel Cleaning Robot

Here is a water-free robot that can clean solar panels to maintain their efficiency. The ECOPPIA E4 moves on a rigid aluminum frame using polyurethane coated wheels and doesn’t put any load on your solar panels. It is powered by 5 motors, one for microfiber elements and 4 for moving up and down and along the panel row.


")


