











")


















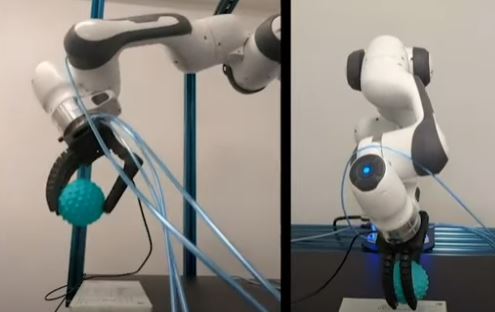
This is the DragonClaw: a 3D-printable, pneumatically actuated, three-fingered dexterous gripper with embedded magnetic tactile sensing that can perform power grasps. It can complete a modified Kapandji test with its magnetic sensor (ReSkin) allowing it to respond to external disturbances.
More like this ➡️ here
AMTL - DragonClaw: A Low-Cost Pneumatic Gripper with Integrated Magnetic Sensing

The idea for this project is to make soft grippers with embedded sensing accessible to people who are not soft robot experts. The above video shows it in action. Detailed instructions and materials are available on DragonClaw’s website.
*Our articles may contain aff links. As an Amazon Associate we earn from qualifying purchases. Please read our disclaimer on how we fund this site.














