






























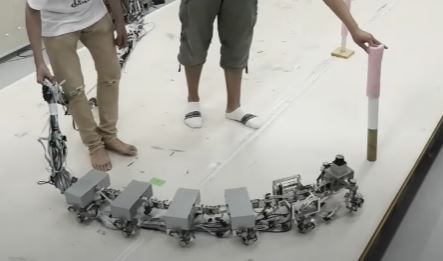
Here is a myriapod robot that relies on variable body-axis flexibility to navigate. Developed by researchers from the Department of Mechanical Science and Bioengineering at Osaka University, this robot can turn without a complex control system thanks to its flexible couples. This robot was inspired by insects that make quick movement changes by controlling the dynamic instability in their motion.
More like this ➡️ here
Team develops a centipede robot with variable body-axis flexibility

The above video shows how this robot works.
[HT] [credit: Shinya Aoi, Yuki Yabuuchi, Daiki Morozumi, Kota Okamoto, Mau Adachi, Kei Senda, and Kazuo Tsuchiya]
*Our articles may contain aff links. As an Amazon Associate we earn from qualifying purchases. Please read our disclaimer on how we fund this site.














